不知道大伙有没有感觉到,cursor这东西出来后web开发星人的危机感…这玩意可能要带来生产方式的大变革…尝试布局中
DL basic
感知机->神经网络
感知机的设计思想很像神经网络的雏形。感知机是接收0,1信号,并输出0,1信号的一种处理结构。中间会进行函数运算,如:
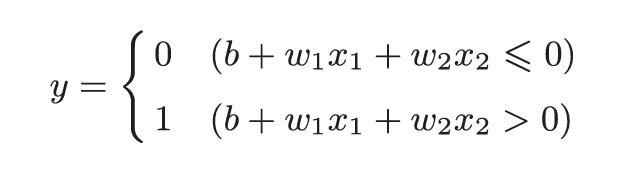
权重w是控制输入信号重要性的参数;偏置b是调整神经元被激活的容易程度。
用感知机能够实现与门,与非门,或门的模拟。
然而,感知机无法实现异或门的输出,其局限性在于它只能表示由一条直线分割的空间。为了实现异或门,我们引入多层感知机:
激活函数
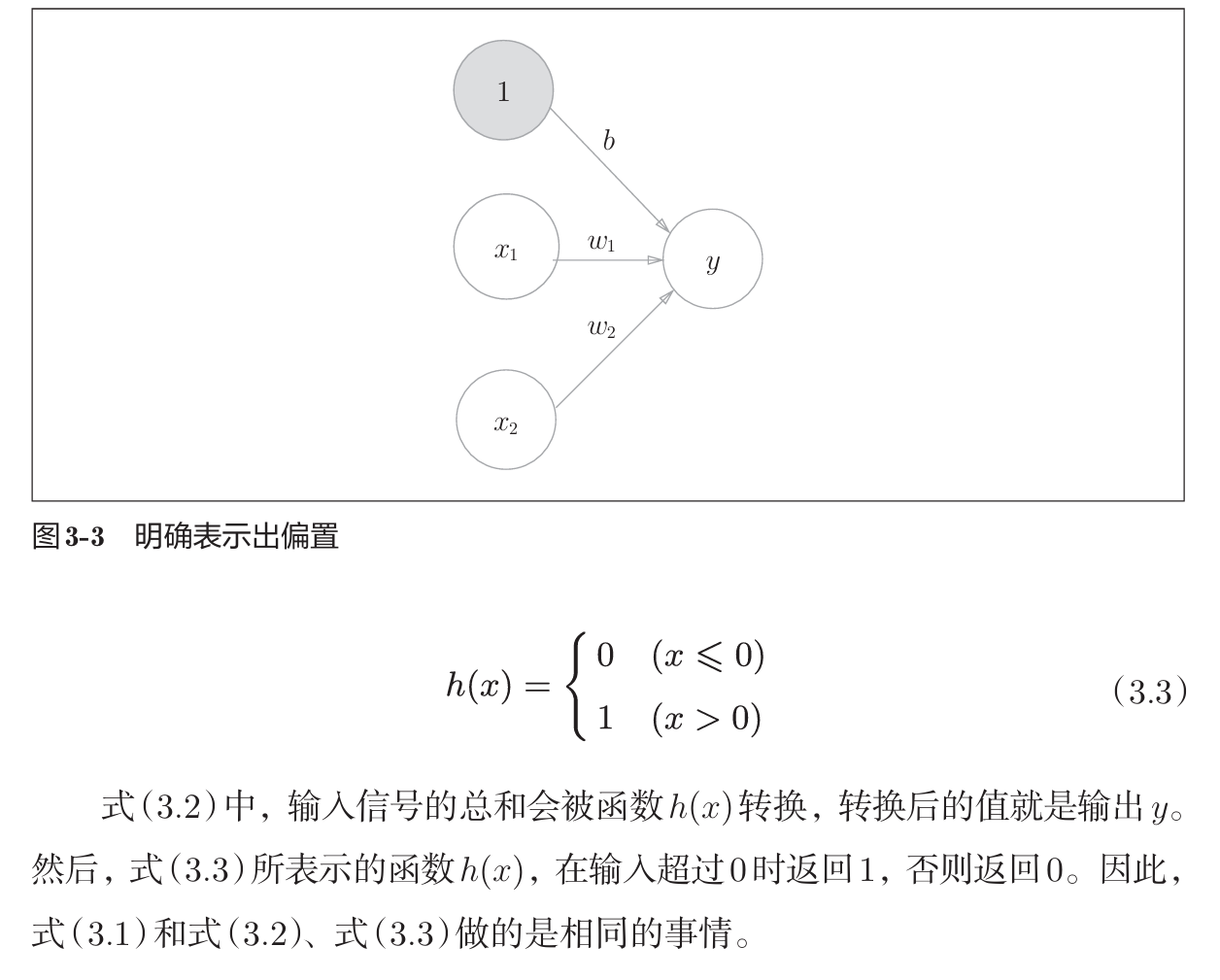
如hx所示,激活函数是将输入信号的总和转换为输出信号。
hx这样的激活函数称为阶跃函数(一旦输入超过阈值就切换输出的函数)。
- sigmoid函数:
|
|
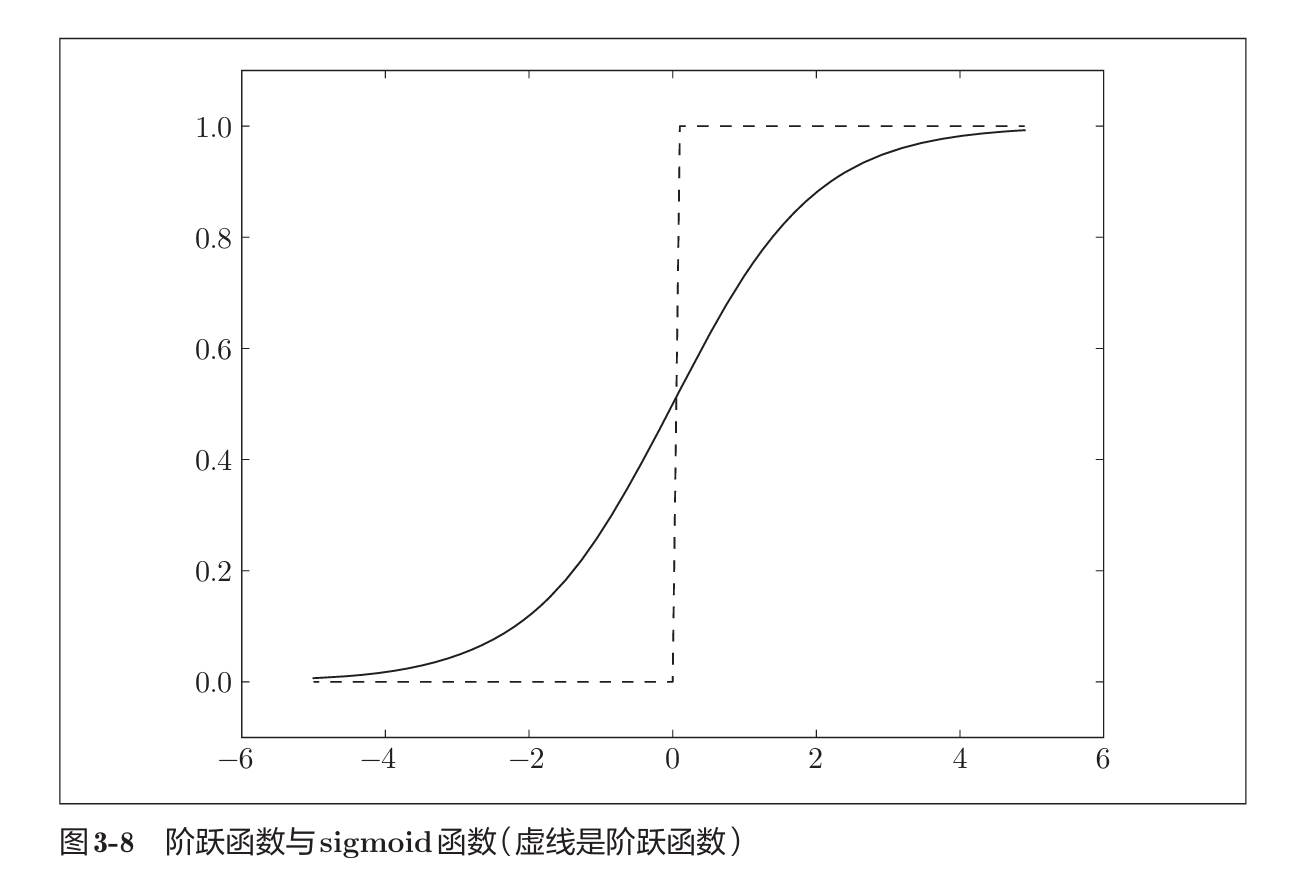
与阶跃函数不同,sigmoid函数1.曲线平滑,2.单调递增,位于(0, 1)中。
神经网络的激活函数必须使用非线性函数,原因在于,线性函数不管如何增加层数,总是存在与之等效的“无隐藏层的神经网络”。
- ReLU:
|
|
- softmax函数
对于分类问题,输出层一般用softmax激活函数;回归问题,输出层一般用恒等函数。
|
|
损失函数
- 均方误差(MSE):
- 交叉熵误差:

|
|
-
梯度:模型全部参数的偏导数汇总而成的向量,其单个值是将其他参数值先固定,然后对该参数求偏导数得到,代表了当该参数稍微变化时,损失函数Loss会发生多大变化。
在求出梯度后,根据学习率*偏导数更新参数
矩阵&向量求导
https://zhuanlan.zhihu.com/p/263777564
本质就是 f 中的每个f分别对变元中的每个元素逐个求偏导,只不过写成了向量、矩阵形式而已。
举几个例子:
-
标量f对向量求导,如Loss是均方误差,y是结果向量(一般是一维列向量),最终求导结果是y-t(y,t均为向量)
-
矩阵f对矩阵求导,如线性层Y=XW,X(100,784) W(784,50) Y(100,50),这里直接有结论:

这里Alpha为全1矩阵,在反向传播过程中,Alpha形状和Y相同,因此我们直接×反向传过来的Y的梯度值即可
https://juejin.cn/post/7325259560524136499
维度验证角度看矩阵求导:
https://zhuanlan.zhihu.com/p/25202034
反向传播
- 数值微分法:与反向传播更新梯度不同,数值微分法直接采用f(x+h)-f(x-h)/2h的方法进行拟合计算,这样不涉及局部计算,对任意参数(如矩阵W,b),都可以直接用Loss作为f,进行数值微分计算。
|
|
而反向传播法则利用链式法则,大大减少了计算量(之前为了算梯度,还得再前向两次)。
手撸2层神经网络
期望以MNIST数据集为案例,使用numpy手写网络来实现数字识别,可参考鱼书。
https://github.com/jimmie-wang/deep_learning_basic_jim
优化方法
梯度如何更新
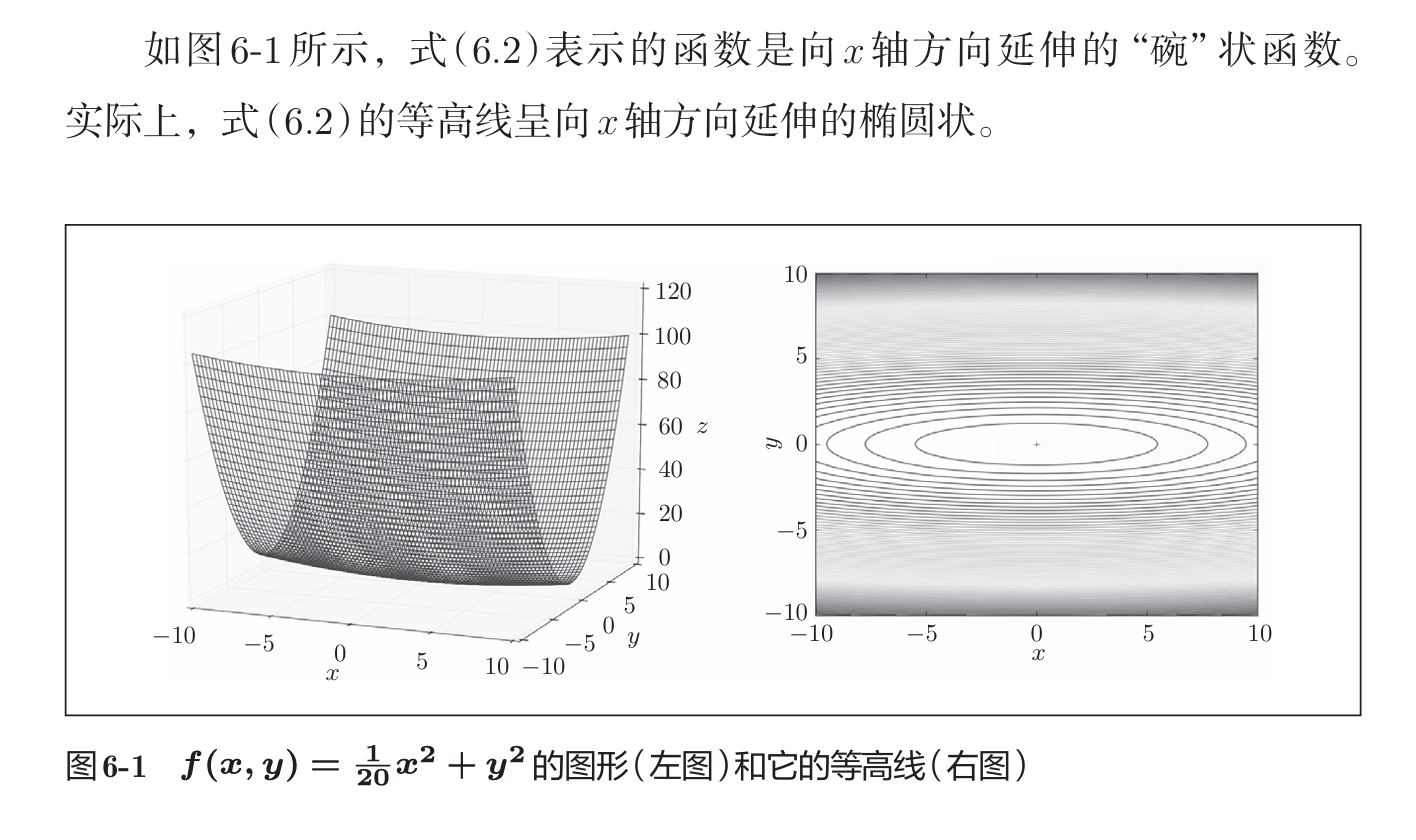
在梯度更新的方法中,我们之前用了SGD,随机梯度下降法,其方法简单,但存在如下问题:
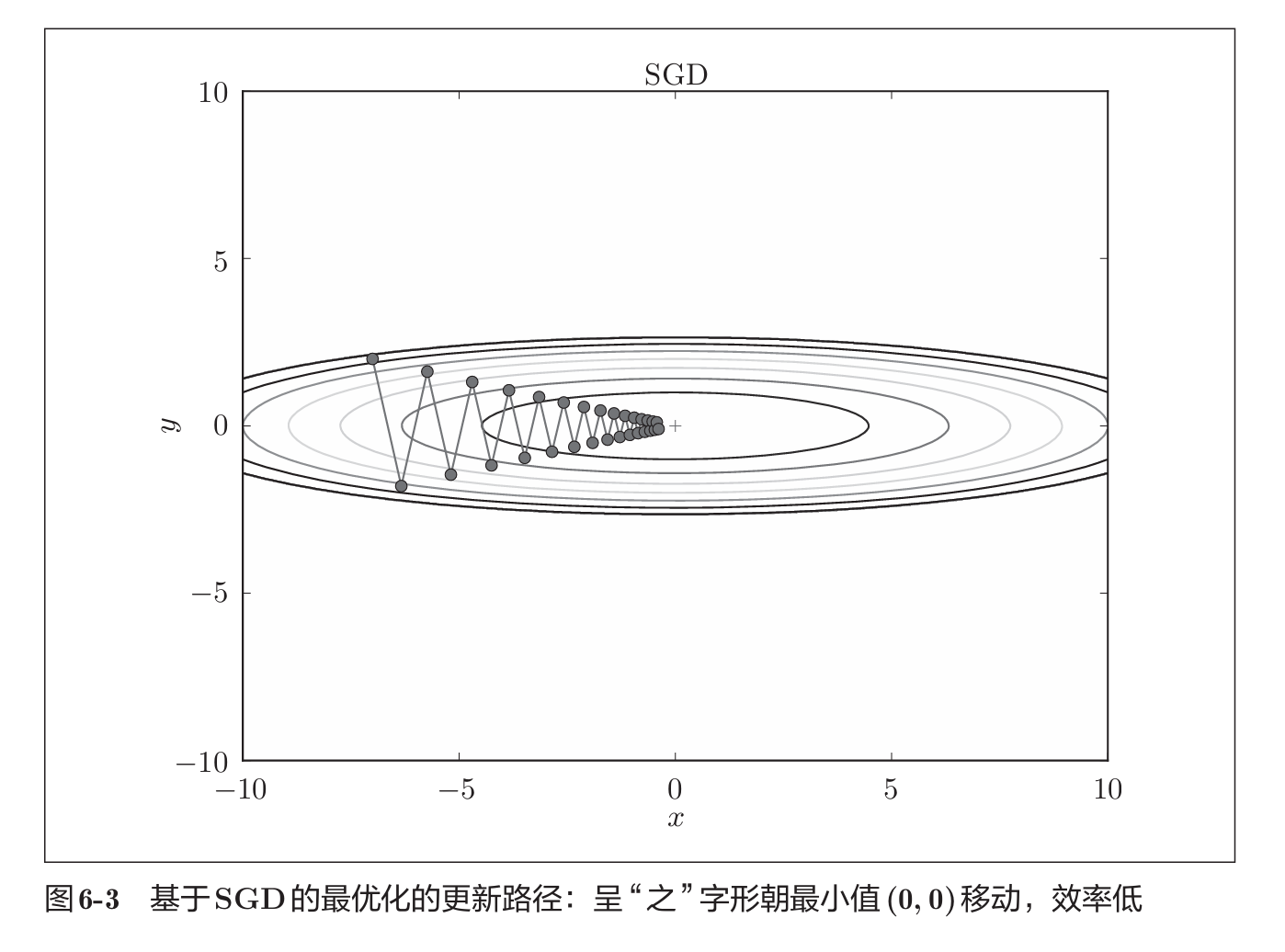
接下来提出几种优化方法改正这一缺点:
- Momentum:在随机梯度下降基础上,添加之前梯度的影响:

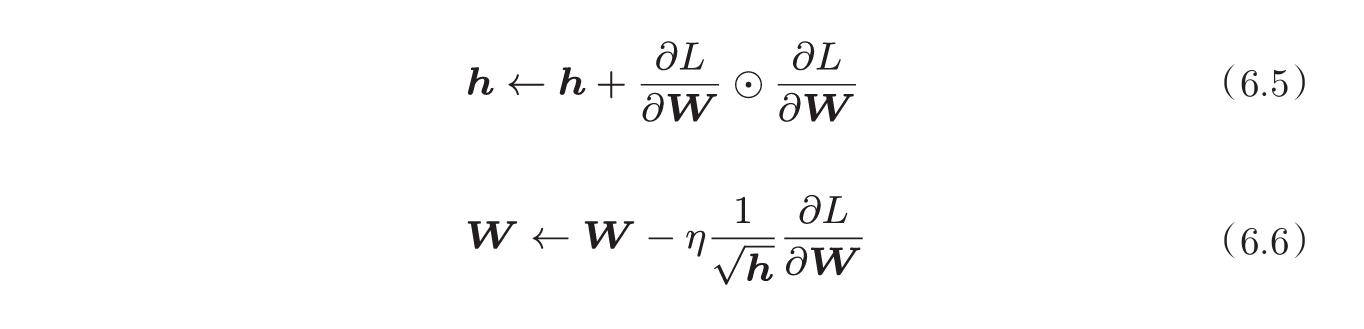
- AdaGrad:为每个参数,指定逐渐减小的学习率
- Adam:综合了上述两种方法,一个是按照物理规律参考之前运动轨迹,另一个是学习率逐渐衰减。
权重初始值
-
采用标准差为1的高斯分布,观察激活后值的分布发现,发生了梯度消失;而采用标准差为0.01的高斯分布,发现激活值集中分布在0.5,意味着多个神经元输出几乎相同的值,表现力受限。
-
当激活函数使用ReLU时,权重初始值使用He初始值,当 激活函数为sigmoid或tanh等S型曲线函数时,初始值使用Xavier初始值。 这是目前的最佳实践。
-
Batch Normalization:调整各层的激活值分布使其拥有适当的广度,在激活函数前,Affine层之后,加入Batch Norm层,将输入数据调整为均值为0,方差为1的分布。通过使用Batch Normalization,可以在训练时不过分依赖初始值。
-
正则化:
1. 权值衰减,在学习过程中,对大的权重进行惩罚,来抑制过拟合。很多过拟合是由于权重参数取值过大才发生的。通常,我们为损失函数加上权重的平方范数:1/2(lambdaW^2),求导后变为lambdaW。对于所有权重,权值衰减方法都会为损失函数加上1/2(lambda*W^2)。因此,在求权重梯度的计算中,要为之前的误差反向传播法的结果加上正则化项的导数λW。
2.Dropout,在学习过程中,随机删除神经元。
- 超参数最优化:给超参数设定一个取值范围,并随机取样进行学习,挑出Accuracy较高的取值,并缩小取值范围,不断优化超参数的取值。
卷积神经网络
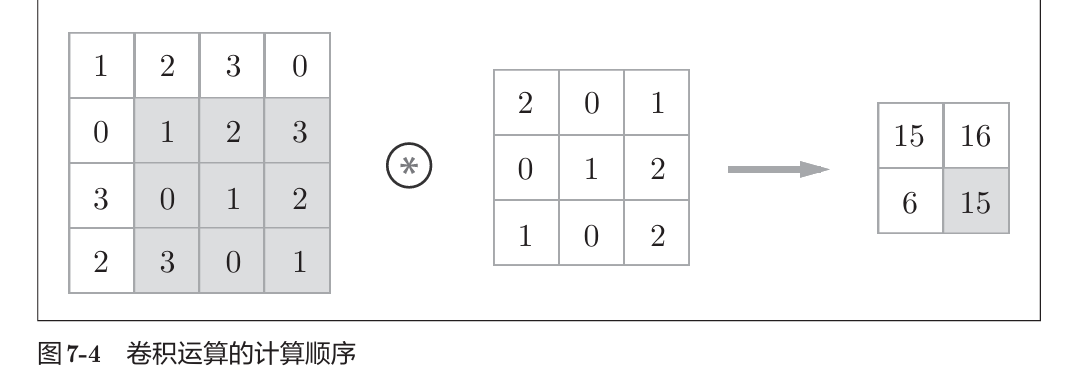
卷积计算
- 2维:
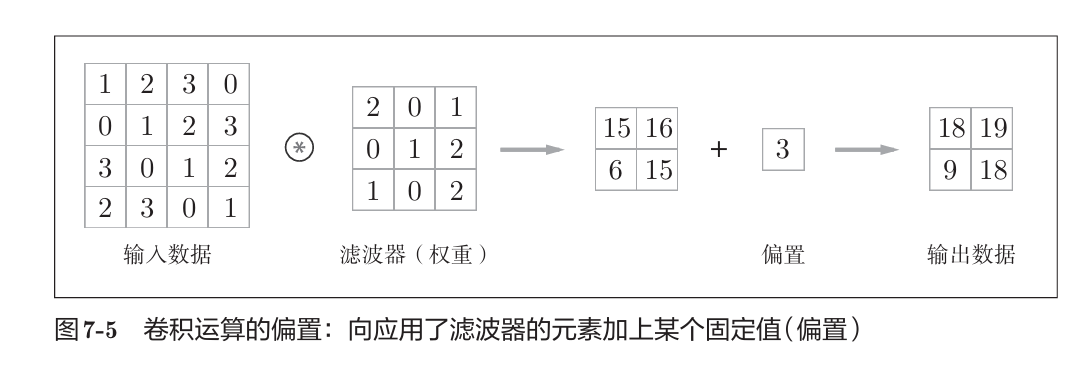
卷积核,又称滤波器,在原始图像(假设是m*n的二维数据)上进行矩阵按元素乘法,并移动,输出矩阵后,再加固定偏置。
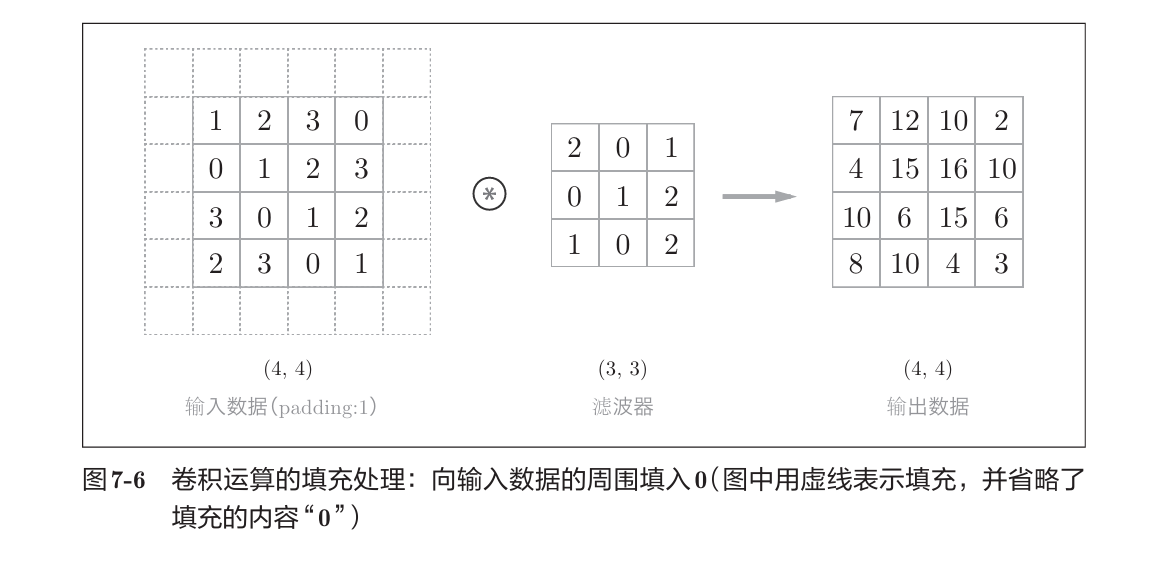
在这个过程中,可能有填充:
而步幅stride表示每次移动多少单位
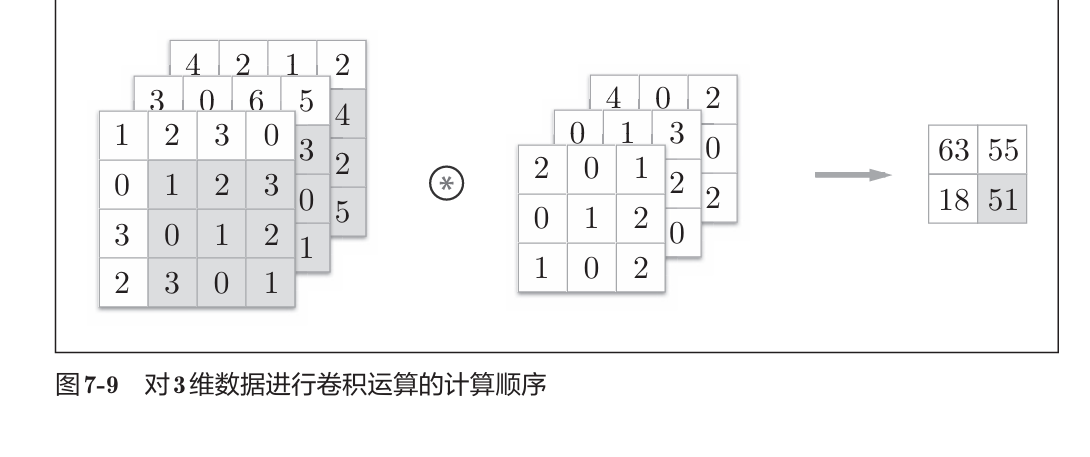
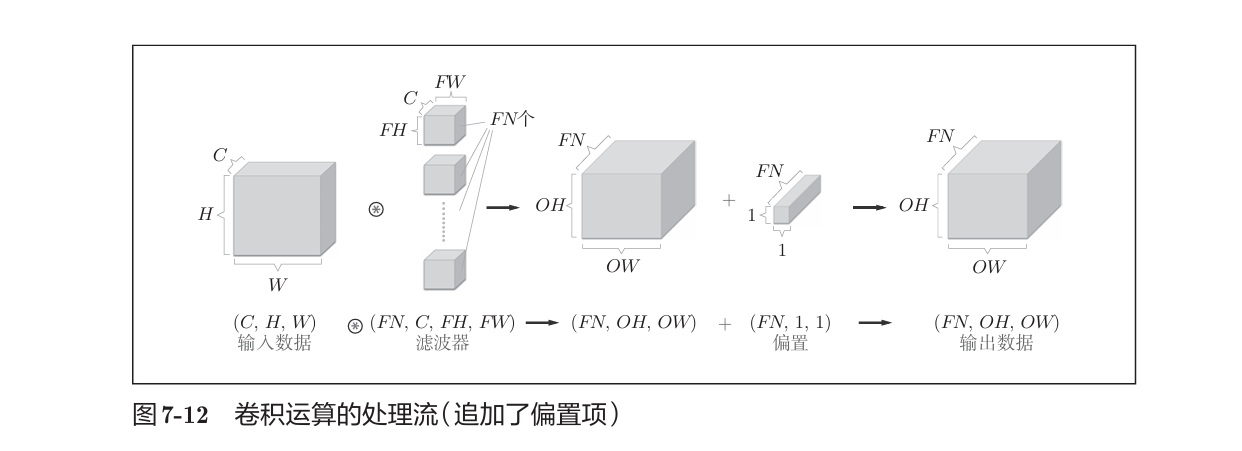
由于图像都是三维数据,且需要三个通道结合才能提取出共性特征,因此我们需要三维卷积:
在多通道(维)卷积中,有几个卷积核,结果就有几个通道。如一个卷积核过程:按通道,按元素位置对应取乘积,再相加。
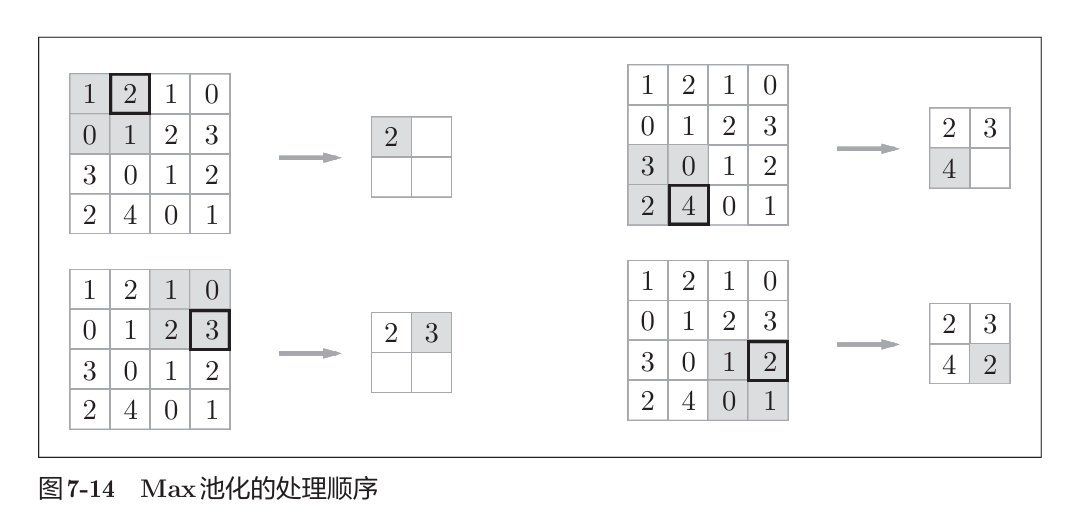
池化计算
缩小高、长方向的空间的运算,有:max池化、average池化
卷积与池化的实现
- 卷积:传递(N, C, H,W)
为了避免多层for对卷积进行运算,这里基于im2col函数进行展开,之后按照矩阵乘法运算:
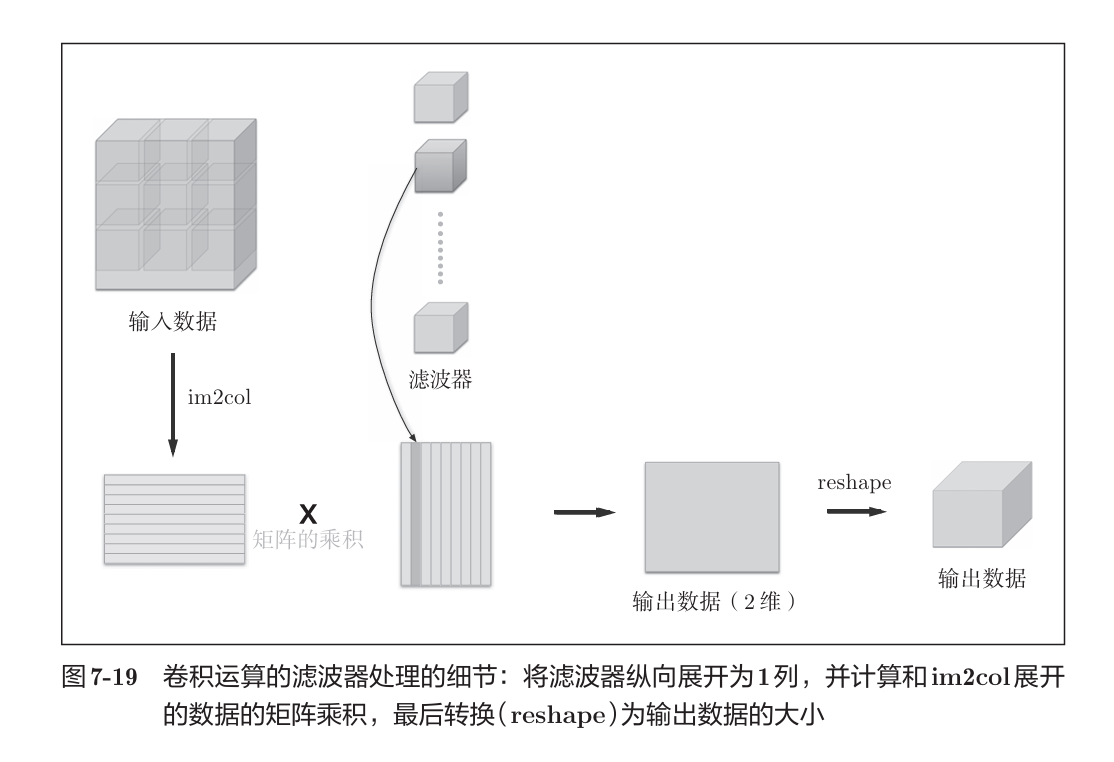
由于一个卷积核输出结果里的一个通道,因此 矩阵的乘积,2维数据中同一列的元素都是一个通道的。
|
|
- 池化:和卷积类似,先通过im2col展开,然后按照池化窗口大小分组,并求最大/平均,最后组装维度
|
|